Истребитель компании focke-wulf с прямоточными воздушно-реактивными двигателями. необычный проект и история его разработки
Содержание:
Принцип действия[править | править код]
Рабочий процесс ПВРД кратко можно описать следующим образом. Воздух, поступая со скоростью полёта во входное устройство двигателя, затормаживается (на практике, до скоростей 30—60 м/с, что соответствует числу Маха 0,1—0,2), его кинетическая энергия преобразуется во внутреннюю энергию — его температура и давление повышаются.
В предположении того, что воздух — идеальный газ, и процесс сжатия является изоэнтропийным, степень повышения давления (отношение статического давления в заторможенном потоке к атмосферному) выражается формулой:
- ppo=(1+k−12⋅Mn2)kk−1{\displaystyle {\frac {p}{p_{o}}}={\bigg (}1+{\frac {k-1}{2}}\cdot M_{n}^{2}{\bigg )}^{\frac {k}{k-1}}}(1)
где
- p{\displaystyle p} — давление в полностью заторможенном потоке;
- po{\displaystyle p_{o}} — атмосферное давление;
- Mn{\displaystyle M_{n}} — полётное число Маха (отношение скорости полёта к скорости звука в окружающей среде),
- k{\displaystyle k} — показатель адиабаты, для сухого воздуха равный 1,4.
На выходе из входного устройства, при входе в камеру сгорания рабочее тело имеет максимальное на всём протяжении проточной части двигателя давление.
Сжатый воздух в камере сгорания нагревается за счёт окисления подаваемого в неё топлива, внутренняя энергия рабочего тела при этом возрастает. Затем рабочее тело сначала, сжимаясь в сопле, достигает звуковой скорости, а потом, расширяясь — сверхзвуковой, ускоряется и истекает со скоростью большей, чем скорость встречного потока, что и создаёт реактивную тягу.
Схема устройства ПВРД на жидком топливе:
- встречный поток воздуха;
- центральное тело;
- входное устройство;
- топливная форсунка;
- камера сгорания;
- сопло;
- реактивная струя.
Схема устройства твердотопливного ПВРД
Зависимость тяги ПВРД от скорости полёта определяется несколькими факторами:
- Чем выше скорость полёта, тем больше расход воздуха через тракт двигателя, а значит, и количество кислорода, поступающего в камеру, что позволяет, увеличив расход горючего, повысить тепловую, а вместе с ней и механическую мощность двигателя.
- Чем больше расход воздуха через тракт двигателя, тем выше создаваемая им тяга, в соответствии с формулой (3). Однако расход воздуха через тракт двигателя не может расти неограниченно. Площадь каждого сечения двигателя должна быть достаточной для обеспечения необходимого расхода воздуха.
- С увеличением скорости полёта, в соответствии с формулой (1), возрастает степень повышения давления β=p2p1{\displaystyle \beta ={\frac {p_{2}}{p_{1}}}} в камере сгорания, что влечёт за собой увеличение термического КПД, который для идеального ПВРД выражается формулой:
-
- ηt=1−1βk−1k{\displaystyle \eta _{t}=1-{\frac {1}{\beta ^{\frac {k-1}{k}}}}}(2)
Препарированный ПВРД «Тор» ракеты «Бладхаунд». Хорошо видны входное устройство и вход в камеру сгорания.
В соответствии с формулой (1), чем меньше разница между скоростью полёта и скоростью истечения реактивной струи, тем меньше тяга двигателя (при прочих равных условиях).
В общем, зависимость тяги ПВРД от скорости полёта может быть представлена следующим образом: пока скорость полёта значительно ниже скорости истечения реактивной струи, тяга растёт с ростом скорости полёта (вследствие повышения расхода воздуха, давления в камере сгорания и термического КПД двигателя), а с приближением скорости полёта к скорости истечения реактивной струи тяга ПВРД падает, миновав некоторый максимум, соответствующий оптимальной скорости полёта.
Сверхзвуковые ПВРД
Сверхзвуковые ПВРД рассчитаны на осуществление полетов в диапазоне скоростей 1 < M < 5.
Торможение газового сверхзвукового потока всегда выполняется разрывно, при этом образуется ударная волна, которая называется скачком уплотнения. На дистанции ударной волны процесс сжатия газа не является изоэнтропийным. Следовательно, наблюдаются потери механической энергии, уровень увеличения давления в нем меньший, нежели в изоэнтропийном процессе. Чем мощнее будет скачок уплотнения, тем больше изменится скорость потока на фронте, соответственно, больше потери давления, иногда достигающие 50%.

Для того чтобы минимизировать потери давления, организуется сжатие не в одном, а нескольких скачках уплотнения с меньшей интенсивностью. После каждого из таких скачков наблюдается снижение скорости потока, которая остается сверхзвуковой. Это достигается, если фронт скачков расположен под углом к направлению скорости потока. Параметры потока в интервалах между скачками остаются постоянными.
В последнем скачке скорость достигает дозвукового показателя, дальнейшие процессы торможения и сжатия воздуха происходят непрерывно в канале диффузора.
Если входное устройство мотора расположено в области невозмущенного потока (например, впереди летательного аппарата на носовом окончании или на достаточном отдалении от фюзеляжа на крыльевой консоли), оно выполняется асимметричным и комплектуется центральным телом – острым длинным «конусом», выходящим из обечайки. Центральное тело предназначено для создания во встречном воздушном потоке косых скачков уплотнения, которые обеспечивают сжатие и торможение воздуха до момента его поступления в специальный канал входного устройства. Представленные входные устройства получили название устройств конического течения, воздух внутри них циркулирует, образуя коническую форму.
Центральное коническое тело может быть оснащено механическим приводом, который позволяет ему двигаться вдоль оси двигателя и оптимизировать торможение потока воздуха на разных скоростях полета. Данные входные устройства называются регулируемыми.
При фиксации двигателя под крылом или снизу фюзеляжа, то есть в области аэродинамического влияния элементов конструкции самолета, используют входные устройства плоской формы двухмерного течения. Они не оснащаются центральным телом и имеют поперечное прямоугольное сечение. Их еще называют устройствами смешанного или внутреннего сжатия, поскольку внешнее сжатие здесь имеет место только при скачках уплотнения, образующихся у передней кромки крыла или носового окончания летательного аппарата. Входные регулируемые устройства прямоугольного сечения способны менять положение клиньев внутри канала.
В сверхзвуковом скоростном диапазоне ПВРД более эффективен, нежели в дозвуковом. К примеру, на скорости полета М=3 степень увеличения давления составляет 36,7, что приближается к показателю турбореактивных двигателей, а расчетный идеальный КПД достигает 64,3 %. На практике эти показатели меньшие, но на скоростях в диапазоне М=3-5 СПВРД по эффективности превосходят все существующие типы ВРД.
При температуре невозмущенного воздушного потока 273°K и скорости самолета М=5 температура рабочего заторможенного тела равна 1638°К, при скорости М=6 — 2238°К, а в реальном полете с учетом скачков уплотнения и действия силы трения становится еще выше.
Дальнейшее нагревание рабочего тела является проблематичным из-за термической неустойчивости конструкционных материалов, входящих в состав двигателя. Поэтому предельной для СПВРД считается скорость, равная М=5.
Из истории развития реактивных двигателей
Так покоряли скорость
На 1940-1950-е годы пришелся бум развития авиационного моторостроения — появились и начали серийно использоваться на самолетах реактивные двигатели различных конструкций. Эти силовые установки на боевых самолетах обеспечивали повышенную маневренность и лучшее ускорение по сравнению с традиционными поршневыми двигателями, а также позволяли выполнять, пусть и кратковременные, полеты на скорости, превышающей скорость звука.
В 1950-х годах началась разработка новых боевых и разведывательных летательных аппаратов, способных безопасно для себя действовать в воздушном пространстве, охраняемом системами противовоздушной обороны противника. В частности, ставка делалась на скорость полета — считалось, что чем быстрее летит самолет, тем меньше шансов у зенитной ракеты его догнать.
Необходимость наращивать скорость потребовала поиска новых конструкторских решений. Дело в том, что уже существовавшие тогда воздушно-реактивные авиационные двигатели при всех возможных ухищрениях не могли обеспечить скорость полета больше 2–2,5 числа Маха.
Разработчики авиационной техники начали экспериментировать с другими двигателями. Наиболее очевидным вариантом оказался ракетный двигатель, не имеющий ограничений по скорости встречного воздушного потока, поскольку для сжигания топлива атмосферный кислород он не использует.
Такой двигатель способен обеспечивать высокие скорости полета. Например, американский экспериментальный самолет Bell X-1 уверенно развивал скорости полета, близкие к 2 числам Маха, а в 1953 году достиг скорости в 2,5 числа Маха на высоте 21,4 тысячи метров. В 1963 году ракетоплан X-15 развил гиперзвуковую скорость в 5,58 числа Маха.
Тем не менее, ракетные двигатели плохо подходили для создания серийных военных, главным образом разведывательных, самолетов. Дело в том, что они не могли обеспечить большую продолжительность полета, а учитывая политическую обстановку того времени, она была крайне желательна, поскольку СССР от США отделяет значительное расстояние.
Так исследователи начали работать над комбинированными двигателями, которые могли бы сочетать в себе свойства силовых установок разных классов.
Если упрощенно описывать работу такого двигателя, то она выглядела следующим образом: ракетная силовая установка сжигала топливо не полностью, после чего газовая струя с не сгоревшим топливом поступала в прямоточный двигатель, где тормозилась и сжималась. Там топливо дожигалось, и отработанные газы выходили из двигателя, создавая тягу.
Аналогичные проекты существовали и в США. В целом по теме комбинированных двигателей разработки велись по нескольким направлениям. Помимо ракетно-прямоточных создавались турбопрямоточные (газотурбинный и прямоточный контуры) и ракетно-турбинные (ракетный и газотурбинный контуры).
Некоторые проекты таких силовых установок предполагали, что они смогут обеспечить скорость полета больше 3 чисел Маха, а некоторые, работающие в том числе и на водороде, — больше 5 чисел Маха. К гиперзвуковой принято относить скорость больше 5 чисел Маха.
Процесс работы двигателя
Рабочий цикл 2-хтактного двигателя включает в себя следующую последовательность действий:
— на такте сжатия поршень в цилиндре перемещается из нижней мертвой точки (НМТ) к верхней (ВМТ). Через продувочное окно топливный заряд попадает в надпоршневое пространство – камеру сгорания, после чего поршень перекрывает собой это окно. Поднимаясь выше, он постепенно перекрывает и выпускное окно, через которое удаляются продукты сгорания. При этом в пространстве под поршнем (кривошипной камере) образуется разрежение, и оно заполняется новой порцией топлива. При достижении поршнем ВМТ сжатый топливный заряд воспламеняется;
— на такте расширения газы, образовавшиеся при сгорании топлива, давят на поршень, он опускается вниз, открывая сначала выпускное окно, а затем продувочное. Через первое окно расширенные газы попадают в глушитель и выводятся наружу. Одновременно при движении поршня вниз в кривошипной камере, заполненной топливом, повышается давление. Топливо выталкивается вверх в цилиндр, заполняя надпоршневое пространство и выталкивая остатки отработанных газов. После чего цикл повторяется.
Такой принцип работы позволяет двухтактным двигателям обойтись без газораспределительной системы, характерной для четырехтактных моторов, которая управляет впускным и выпускным клапанами. С одной стороны это упрощает конструкцию и уменьшает вес, но с другой газообмен в камере сгорания далеко не идеальный. При двухтактном режиме работы при продувке цилиндра вместе с отработанными газами в глушитель попадает и определенное количество несгоревшего топлива, что влечет за собой его перерасход и повышает токсичность выхлопных газов.
История
Leduc 0.10 — первый пилотируемый аппарат с маршевым ПВРД (первый полёт — 19 ноября 1946). Музей авиации и космонавтики в Ле-Бурже
В 1913 году француз Рене Лорин получил патент на прямоточный воздушно-реактивный двигатель.
ПВРД привлекал конструкторов простотой своего устройства, но главное — своей потенциальной способностью работать на гиперзвуковых скоростях и в самых высоких, наиболее разреженных слоях атмосферы, то есть в условиях, в которых ВРД других типов неработоспособны или малоэффективны. В 1930-х годах с этим типом двигателей проводились эксперименты в США (Уильям Эвери), в СССР (Ф. А. Цандер, Б. С. Стечкин, Ю. А. Победоносцев).
В 1937 году французский конструктор Рене Ледюк получил заказ от правительства Франции на разработку экспериментального самолёта с ПВРД. Эта работа была прервана войной и возобновилась после её окончания. 19 ноября 1946 года состоялся первый в истории полёт пилотируемого аппарата с маршевым ПВРД, Leduc 0.10. Далее в течение 10 лет было изготовлено и испытано ещё несколько экспериментальных аппаратов этой серии, в том числе, пилотируемые Leduc 0.21 и Leduc 0.22, а в 1957 году правительство Франции отказалось от продолжения этих работ — бурно развивавшееся в то время направление турбореактивных двигателей представлялось более перспективным.
Обладая рядом недостатков для использования на пилотируемых самолётах (нулевая тяга при неподвижности, низкая эффективность на малых скоростях полёта), ПВРД является предпочтительным типом ВРД для беспилотных одноразовых снарядов и крылатых ракет, благодаря своей простоте, а следовательно, дешевизне и надёжности. Начиная с 1950-х годов, в США было создан ряд экспериментальных самолётов и серийных крылатых ракет разного назначения с этим типом двигателя.
В СССР с 1954 по 1960 год в ОКБ-301 под руководством генерального конструктора С. А. Лавочкина, разрабатывалась крылатая ракета «Буря», предназначавшаяся для доставки ядерных зарядов на межконтинентальные расстояния, и использовавшая в качестве маршевого двигателя ПВРД, разработанный группой М. М. Бондарюка, и имевший уникальные для своего времени характеристики: эффективная работа на скорости свыше М = 3 и на высоте 17 км. В 1957 году проект вступил в стадию лётных испытаний, в ходе которых выявился ряд проблем, в частности, с точностью наведения, которые предстояло разрешить, и на это требовалось время, которое трудно было определить. Между тем, в том же году на вооружение уже поступила МБР Р-7, имевшая то же назначение, разработанная под руководством С. П. Королёва. Это ставило под сомнение целесообразность дальнейшей разработки «Бури». Смерть С. А. Лавочкина в 1960 году окончательно похоронила проект.
Из числа более современных отечественных разработок можно упомянуть противокорабельные крылатые ракеты с маршевыми ПВРД: П-800 «Оникс», П-270 «Москит».
Основной этап
Изготавливая реактивный пульсирующий двигатель дома, помните, что трубы фиксированного диаметра легко сформировать при помощи большего аналога. Вполне реально операцию провести руками за счет рычажного принципа, после чего края заготовки обработать киянкой, загибая их до нужной кондиции. Желательно, чтобы концы при стыковании образовывали плоскость, что улучшит размещение сварного шва. Листы в трубу согнуть сложнее, потребуется листогиб или вальцы. Этот профессиональный инструмент найдется далеко не у каждого. В качестве альтернативы допускается использование тисов.
Важный и кропотливый момент – сварка тонкого листа из металла. Здесь потребуются специальные навыки, особенно если в процессе применяется ручная дуговая сварка. Новичкам лучше не пытаться экспериментировать (малейшая передержка электрода в одной точке приводит к прожиганию дыры). Кроме того, в район шва могут попасть пузырьки, что впоследствии гарантирует течь. Лучше всего провести шлифовку шва до минимальной толщины, что позволит увидеть «брак» невооруженным глазом сразу. Конические сегменты сгибают вручную, обжимают узкий конец заготовки вокруг трубы малого диаметра, делая большее усилие, чем на широкую часть.

Виды газораспределительной системы
Так как продувочные окна в цилиндре порой располагаются на одном уровне, то газообмен внутри цилиндра затруднен, не весь объем цилиндра продувается свежей порцией воздушной смеси, и часть отработанных газов остается в цилиндре. Для того, чтобы сменить отработанные газы на свежую порцию воздуха более эффективно и быстро, существует конструктивные особенности поршня и расположения продувочных окон в цилиндре. Различают несколько вариантов осуществления продувки цилиндров:
Контурная продувка
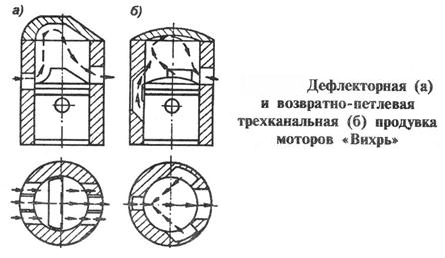 Контурная продувка в свою очередь делится на возвратно-петлевую, дефлекторную и высотную. Во всех этих видах есть один существенный недостаток: перерасход топлива из-за удаления несгоревшего топливного заряда во время продувки.
Контурная продувка в свою очередь делится на возвратно-петлевую, дефлекторную и высотную. Во всех этих видах есть один существенный недостаток: перерасход топлива из-за удаления несгоревшего топливного заряда во время продувки.
П- или Л-образная продувка
П- или Л-образная продувка более эффективная в плане экономии топлива, но при этом температура около выпускного окна значительно повышается. Конструктивная особенность в том, что для ее осуществления необходимы двухцилиндровое исполнение мотора. Одна пара цилиндр — поршень выступает в роли впускающих газы, а другая пара в роли выпускающая газы.
Клапанная или клапанно-щелевая продувка
Клапанная или клапанно-щелевая продувка в отличие от других видов требует наличия ГРМ, который управляется клапанами. Клапан может использоваться и для подачи заряда, и для удаления продуктов сгорания. При клапанно-щелевой продувке через клапан в головке цилиндра удаляются отработанные газы, а через окна (щели) поступает свежий заряд. Это уменьшает расход топлива и снижает токсичность отработанных газов, но усложняет конструкцию двигателя и может нарушить нормальный режим сгорания заряда из-за повышенной температуры.
Прямоточная продувка
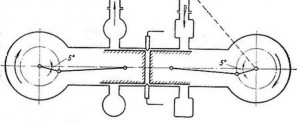 Прямоточная продувка используется в двигателях с двумя поршнями, расположенными напротив друг друга в горизонтальном положении. В этом случае каждый поршень по ходу своего движения открывает и закрывает «свой» клапан: один поршень отвечает за впуск заряда, а второй – за удаление газов. Камерой сгорания в этом случае является пространство между поршнями. Этот вариант предусматривает наличие более сложного КШМ, а высокая температура внутри цилиндров требует дополнительного охлаждения и более прочных элементов. В то же время, это наиболее эффективный способ продувки, который обеспечивает полное удаление отработанных газов с минимальными потерями топливного заряда.
Прямоточная продувка используется в двигателях с двумя поршнями, расположенными напротив друг друга в горизонтальном положении. В этом случае каждый поршень по ходу своего движения открывает и закрывает «свой» клапан: один поршень отвечает за впуск заряда, а второй – за удаление газов. Камерой сгорания в этом случае является пространство между поршнями. Этот вариант предусматривает наличие более сложного КШМ, а высокая температура внутри цилиндров требует дополнительного охлаждения и более прочных элементов. В то же время, это наиболее эффективный способ продувки, который обеспечивает полное удаление отработанных газов с минимальными потерями топливного заряда.
Устройство
Первый контур вмещает в себя компрессоры высокого и низкого давления, камеру сгорания, турбины высокого и низкого давления и сопло. Второй контур состоит из направляющего аппарата и сопла. Такая конструкция является базовой, но возможны и некоторые отклонения, например, потоки внутреннего и внешнего контура могут смешиваться и выходить через общее сопло, или же двигатель может оснащаться форсажной камерой.
Теперь коротко о каждом составляющем элементе ТРДД. Компрессор высокого давления (КВД) – это вал, на котором закреплены подвижные и неподвижные лопатки, формирующие ступень. Подвижные лопатки при вращении захватывают поток воздуха, сжимают его и направляют внутрь корпуса. Воздух попадает на неподвижные лопатки, тормозится и дополнительно сжимается, что повышает его давление и придает ему осевой вектор движения. Таких ступеней в компрессоре несколько, а от их количества напрямую зависит степень сжатия двигателя. Такая же конструкция и у компрессора низкого давления (КНД), который расположен перед КВД. Отличие между ними заключается только в размерах: у КНД лопатки имеют больший диаметр, перекрывающий собой сечение и первого и второго контура, и меньшее количество ступеней ( от 1 до 5).
В камере сгорания сжатый и нагретый воздух перемешивается с топливом, которое впрыскивается форсунками, а полученный топливный заряд воспламеняется и сгорает, образуя газы с большим количеством энергии. Камера сгорания может быть одна, кольцевая, или же выполняться из нескольких труб.
Турбина по своей конструкции напоминает осевой компрессор: те же неподвижные и подвижные лопатки на валу, только их последовательность изменена. Сначала расширенные газы попадают на неподвижные лопатки, выравнивающие их движение, а потом на подвижные, которые вращают вал турбины. В ТРДД турбин две: одна приводит в движение компрессор высокого давления, а вторая – компрессор низкого давления. Работают они независимо и между собой механически не связаны. Вал привода КНД обычно расположен внутри вала привода КВД.
Сопло – это сужающаяся труба, через которую выходят наружу отработанные газы в виде реактивного потока. Обычно каждый контур имеет свое сопло, но бывает и так, что реактивные потоки на выходе попадают в общую камеру смешения.
Внешний, или второй, контур – это полая кольцевая конструкция с направляющим аппаратом, через которую проходит воздух, предварительно сжатый компрессором низкого давления, минуя камеру сгорания и турбины. Этот поток воздуха, попадая на неподвижные лопасти направляющего аппарата, выравнивается и движется к соплу, создавая дополнительную тягу за счет одного только сжатия КНД без сжигания топлива.
Форсажная камера – это труба, размещенная между турбиной низкого давления и соплом. Внутри у нее установлены завихрители и топливные форсунки с воспламенителями. Форсажная камера дает возможность создания дополнительной тяги за счет сжигания топлива не в камере сгорания, а на выходе турбины. Отработанные газы после прохождения ТНД и ТВД имеют высокую температуру и давления, а также значительное количество несгоревшего кислорода, поступившего из второго контура. Через форсунки, установленные в камере, подается топливо, которое смешивается с газами, и воспламеняется. В результате тяга на выходе возрастает порой в два раза, правда, и расход топлива при этом тоже растет. ТРДД, оснащенные форсажной камерой, легко узнать по пламени, которое вырывается из их сопла во время полета или при запуске.
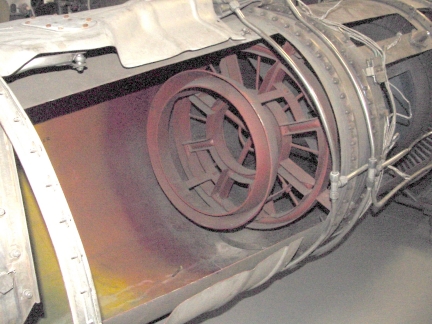
форсажная камера в разрезе, на рисунке видны завихрители.
Самым важным параметром ТРДД является степень двухконтурности (к) – отношение количества воздуха, прошедшего через второй контур, к количеству воздуха, прошедшего через первый. Чем выше этот показатель, тем более экономичным будет двигатель. В зависимости от степени двухконтурности можно выделить основные виды двухконтурных турбореактивных двигателей. Если его значение к<2, это обычный ТРДД, если же к>2, то такие двигатели называются турбовентиляторными (ТВРД). Есть также турбовинтовентиляторные моторы, у которых значение достигает и 50-ти, и даже больше.
В зависимости от типа отведения отработанных газов различают ТРДД без смешения потоков и с ним. В первом случае каждый контур имеет свое сопло, во втором газы на выходе попадают в общую камеру смешения и только потом выходят наружу, образуя реактивную тягу. Двигатели со смешением потоков, которые устанавливаются на сверхзвуковые самолеты, могут снабжаться форсажной камерой, которая позволяет увеличивать мощность тяги даже на сверхзвуковых скоростях, когда тяга второго контура практически не играет роли.
Преимущества и недостатки
Подведя итоги, можно выделить основные преимущества и недостатки ТВД. Преимуществами турбовинтовых двигателей являются:
— небольшой вес в сравнение с поршневыми моторами;
— экономичность и меньший расход топлива в сравнение с турбореактивными двигателями, что объясняется наличием воздушного винта, КПД которого порой достигает 86%.
Но при всех своих достоинствах ТВД не могут полностью заменить собой реактивные двигатели, ведь их конструкция не позволяет развивать большие скорости. Их скоростной предел составляет 750 км/час, тогда как современная авиация требует намного большего. Еще один минус – шум при работе винта, превышающий гранично допустимые значения, определенные Международной организацией гражданской авиации.
Таким образом, несмотря на высокий КПД и экономичность, использование турбовинтовых двигателей ограничено. В основном ими оснащаются самолеты, летающие с небольшой скоростью и на дальние расстояния, что позволяет значительно снизить стоимость пассажирских и грузовых перелетов. В этих случаях их использование полностью оправдано. Но в военной авиации ТВД практически не используются – здесь важны не экономия топлива, а скорость, маневренность и бесшумность, что вполне могут обеспечить турбореактивные двигатели. Вместе с тем в авиационной промышленности постоянно ведутся работы по созданию сверхзвуковых винтов, которые смогли бы преодолевать звуковой барьер без потерь КПД и «эффекта запирания». Возможно, со временем этим двигателям удастся вытеснить своих реактивных собратьев и занять их место в современном авиастроении. Пока же ТВД остаются пусть и не самыми мощными, но выносливыми и надежными «рабочими лошадками».
Детонационный двигатель
Между тем в России специализированная лаборатория «Детонационные ЖРД» научно-производственного объединения «Энергомаш» занимается разработкой спинового детонационного жидкостного ракетного двигателя, работающего на топливной паре кислород-керосин. О первом успешном испытании такой силовой установки было объявлено 26 августа текущего года. Следует отметить, что это первый в мире спиновый детонационный двигатель, разрабатываемый специально для использования на ракетах-носителях. Аналогичную силовую установку сегодня создают и в США, однако ее планируется использовать в качестве более экономичной и эффективной замены газотурбинных двигателей на кораблях ВМС.
Изучение принципов работы и разработка детонационных двигателей ведется в некоторых странах мира уже больше 70 лет. Впервые ими занялись еще в Германии в 1940-е годы. Правда, тогда работающего прототипа детонационного двигателя исследователям создать не удалось, но были разработаны и серийно выпускались пульсирующие воздушно-реактивные двигатели. Они ставились на ракеты «Фау-1». В силовых установках таких ракет топливо подавалось в камеру сгорания небольшими порциями через равные промежутки времени. При этом распространение процесса горения по топливу происходило на скорости, меньшей скорости звука. Такое сгорание называется дефлаграцией, оно лежит в основе работы всех обычных двигателей внутреннего сгорания.
В детонационном двигателе фронт горения распространяется по топливной смеси быстрее скорости звука. Такой процесс горения называется детонацией. Детонационные двигатели сегодня делятся на два типа: импульсные и спиновые. Последние иногда называют ротационными. Принцип работы импульсных двигателей схож с таковым у пульсирующих воздушно-реактивных двигателей: топливо и окислитель подаются в камеру сгорания с высокой частотой через равные промежутки времени. Основное отличие заключается в детонационном горении топливной смеси в камере сгорания. Благодаря детонации топливо сгорает полнее, выделяя большее количество энергии, чем при дефлаграции.
В спиновых детонационных двигателях используется кольцевая камера сгорания. В ней топливная смесь подается последовательно через радиально расположенные клапаны. В таких силовых установках детонация не затухает, пока подаются топливо и окислитель. Во время работы двигателя детонационная волна «обегает» кольцевую камеру сгорания, причем топливная смесь за ней успевает обновиться. При этом, если в импульсном двигателе в камеру сгорания следует подавать предварительно подготовленную смесь топлива и окислителя, то в спиновом двигателе этого делать не нужно — фронт высокого давления, движущийся перед детонационной волной, вполне эффективно смешивает необходимые компоненты. Ротационный двигатель впервые начали изучать в СССР в 1950-х годах.
Благодаря своей экономичности при высокой выдаваемой мощности спиновые детонационные двигатели в ракетах-носителях позволят существенно сократить объемы топлива и окислителя, необходимые для вывода полезного груза на орбиту. На практике (и это свойственно всем уже перечисленным проектам), уменьшение массы двигателя (а силовая установка будет весить меньше обычной ракетной), топлива и окислителя позволит либо увеличить забрасываемый вес носителя при сохранении его габаритов, либо оставить забрасываемый вес неизменным при уменьшении габаритов ракеты. Забрасываемый вес ракеты-носителя — это масса последней ступени, ее топлива и полезного груза.
В перспективе гонку на рынке космических запусков выиграет тот, кто сможет как можно дешевле выводить на орбиту как можно больше грузов. Некоторые компании полагают, что благодаря использованию новых технологий стоимость вывода грузов на низкую орбиту можно будет опустить ниже тысячи долларов за килограмм и ниже десяти тысяч за килограмм при запуске на геопереходную орбиту. Правда, когда именно такое будет возможно, пока неясно. По самым смелым оценкам, новые ракетные двигатели будут использоваться на ракетах-носителях с середины 2020-х годов.
Подготовительный процесс
Прежде чем приступить к сооружению пульсирующего реактивного двигателя своими руками, необходимо очистить листовые металлические заготовки от ржавчины и пыли. Для этого вполне подойдет стандартная шлифовальная машинка. Побеспокойтесь о безопасности – наденьте перчатки, так как края листов острые и изобилуют заусенцами.
Перед началом основных работ нужно подготовить чертежи и картонные шаблоны деталей в натуральную величину. Для получения точной конфигурации и размеров контуры обводят перманентным маркером. Крайне не рекомендуется вырезать развертки при помощи сварочного аппарата, каким бы современным он ни был. Дело в том, что полученные таким способом детали очень плохо свариваются по краям. Желательно для этой цели использовать электрические ножницы по металлу, поскольку в ручном варианте имеется большой риск загибания краев заготовок. Резать нужно аккуратно, надежно зафиксировав обрабатываемый шаблон струбциной или другим подходящим способом.
